
- 研究・開発への取組み
- 品質に対する取組み
- 生産革新への挑戦
- 事業開発センター
- 事業開発センターについて
- 自律移動走行制御システム
It's Navi® - 自律走行ロボットの開発に
ついて - 多給糸フィラメント
ワインダー - ロボット動画集
- お問い合わせ
製品詳細
自律走行ロボットの開発について
病院、図書館、空港、駅、学校…
公共空間で活躍するサービスロボットの実用化を目指します。
ムラテックは、要素技術開発の一環として、2001年から自律走行ロボットの開発に取り組んできました。
| 【2002年~ ロボットサッカー大会「RoboCup」への挑戦】 自律移動ロボットによるサッカー競技大会「RoboCup」に、企業チームとして参戦(2002~2004年)。サッカー競技に参加する為に自律移動ロボットに必要なセンシング・画像処理・通信・走行機構・制御など各種要素技術開発に注力しました。中でも、ロボットに搭載した位置センサなどの情報を統合した自己位置認識技術は、その後のサービスロボット開発へと発展し、「自律走行ロボット」の事業化を目指すこととなりました。 |
 |
| 【2005年~ サービスロボット初号機「KEITA」完成】 慶応義塾大学さまからのご依頼を受けて開発し、同大学入学センターに2005年に導入された「KEITA(慶大)」(2007年には後継機として2号機を導入)は、入学センターに訪問された方を認識すると近づいていき、音声応答で訪問者の求める情報に応じて、同センター内にあるパンフレットやビデオの場所まで自律走行して案内する機能を有していました。このロボット開発により、公共空間にロボットがいることでこれまでにない新しい価値を創出できることの可能性を感じるとともに、公共空間でロボットを稼働させるために必要なさまざまなノウハウを得ることができました。 |
 |
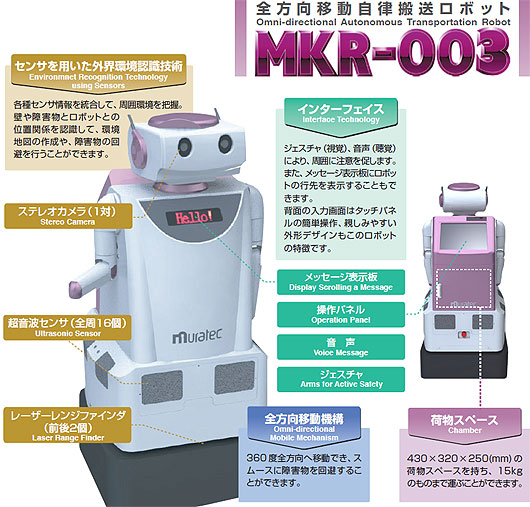
| 【2006年~ 全方向移動自律搬送ロボット「MKR-003」の開発】 NEDO(独立行政法人新エネルギー・産業技術総合開発機構)が実施する「戦略的先端ロボット要素技術開発プロジェクト」に2006年度から5年間参画し、ロボット搬送システムとして全方向移動自律搬送ロボット「MKR-003」の開発を進めました。その中で自己位置推定技術として「SLAM」(Simultaneous Localization and Mapping)の技術を開発し、設備側に埋設工事等を必要としない導入容易な搬送システムを構築しました。また、エレベーター制御部との通信により階間移動も実現しました。人材確保や看護師の付帯業務軽減が課題となっている医療現場での活用が期待され、京都第二赤十字病院さまなど複数の医療施設の協力を得て、薬剤搬送ロボットとしての実証実験も行いました。 |
 |
全方向移動自律搬送ロボットの実証実験

車椅子の衝突回避実験(但し患者役は村田機械社員) |

院内走行テスト |
【2014年~ 自律移動走行制御システム「It’s Navi®」の開発】
MKR-003の開発で培われた、ロボットの自律移動を実現する制御システム(Intelligent Transfer Navigation System)「It's NAVI®(イッツナビ)」を2014年に製品化しました。
ムラテックは、自律走行ロボットの実用化を通じて、次世代のサービスロボット市場形成の一翼を担いたいと考えています。ムラテックのロボット技術の今後にご期待ください。